A Blog for Robot News, Opinions and My Pictures that are Robot Related.
Roboton - 1) Abbreviation of Robot Town. 2) Abbreviation of Robot Autonomous.
Tuesday, August 10, 2004
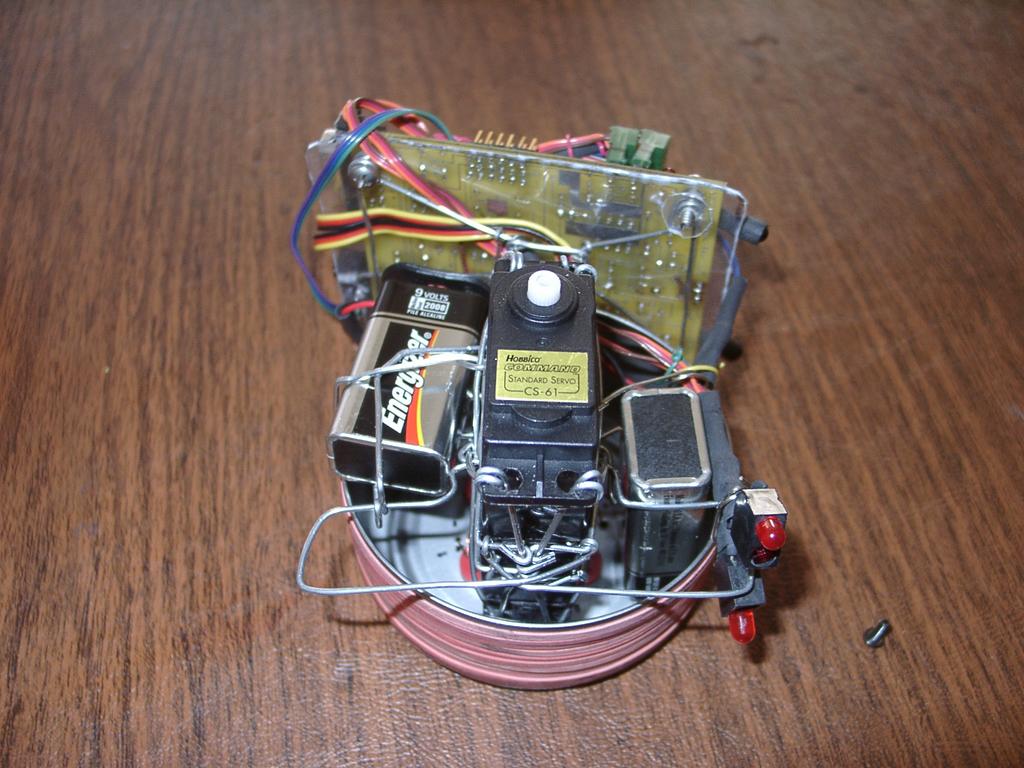
2004-07-08 Tunabot, back view, power switch on left, serial debug port on the right
Another front-on view
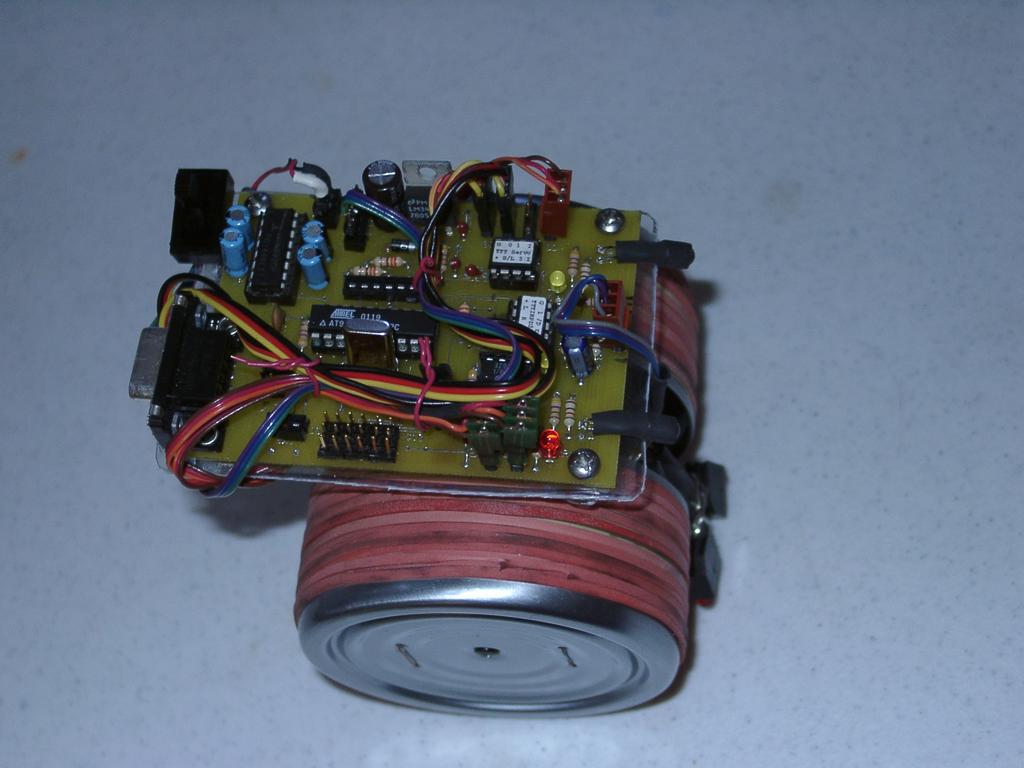
Closeup of the circuit board, the servo power jumper is detached
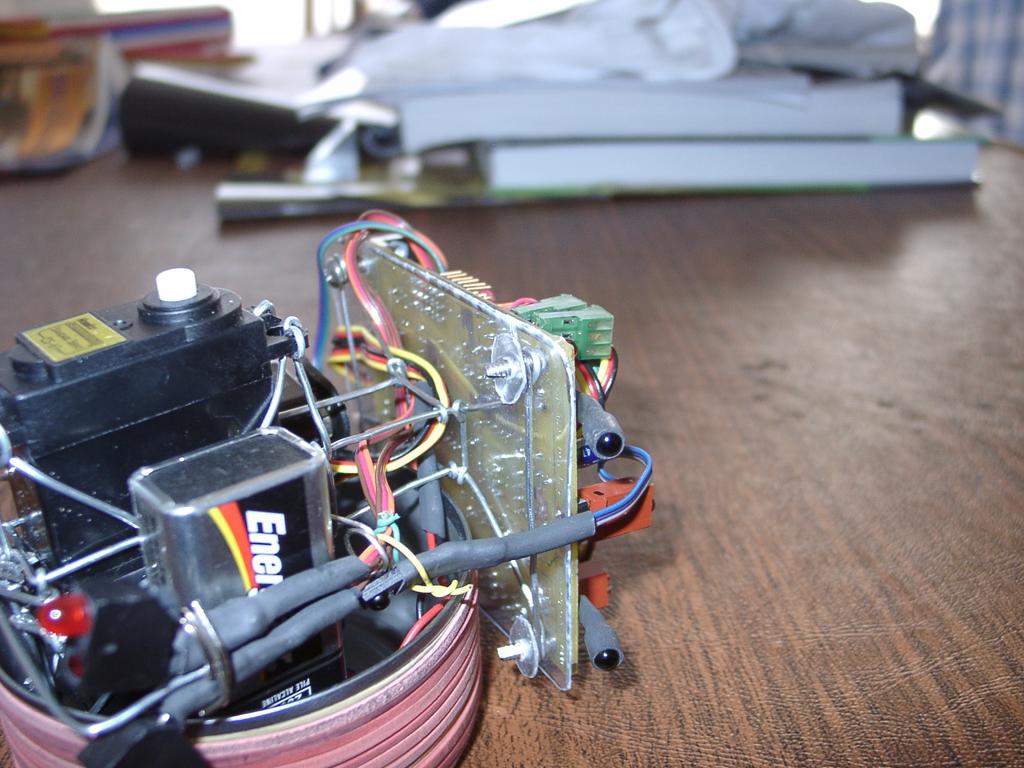
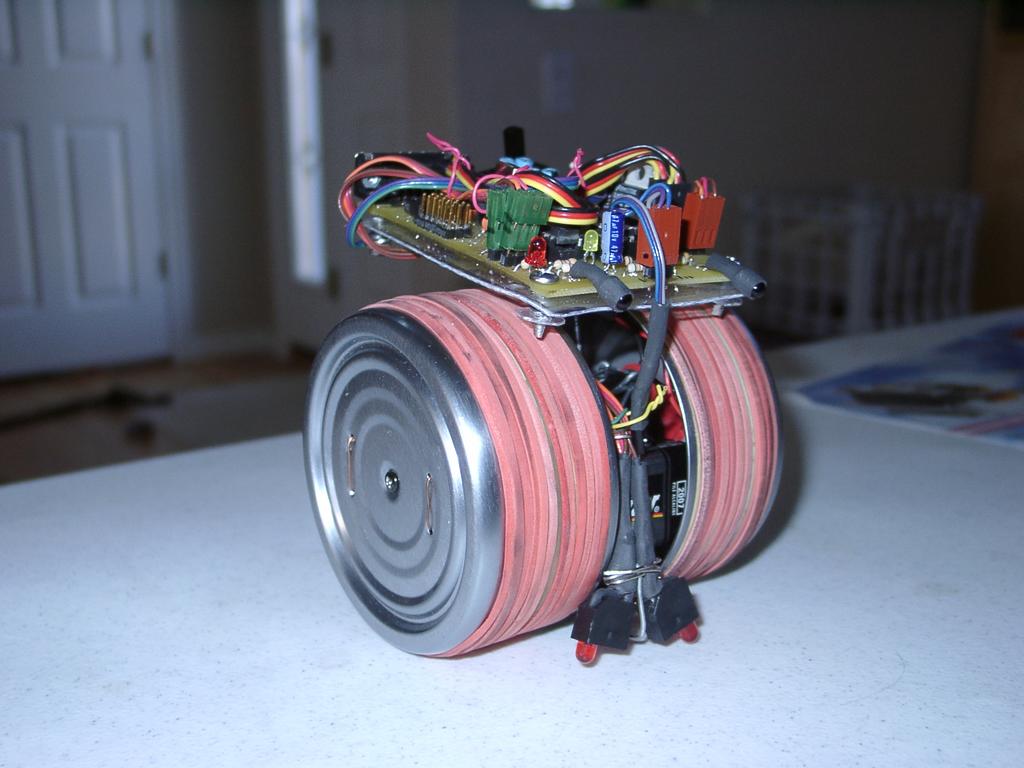
Side-on view
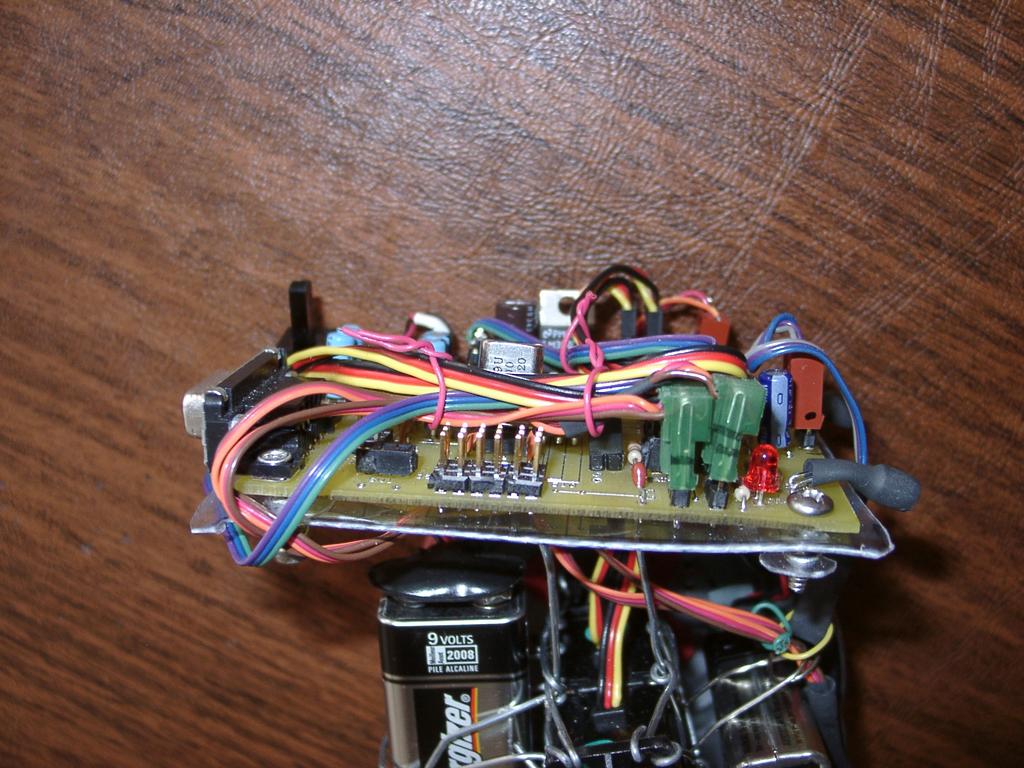
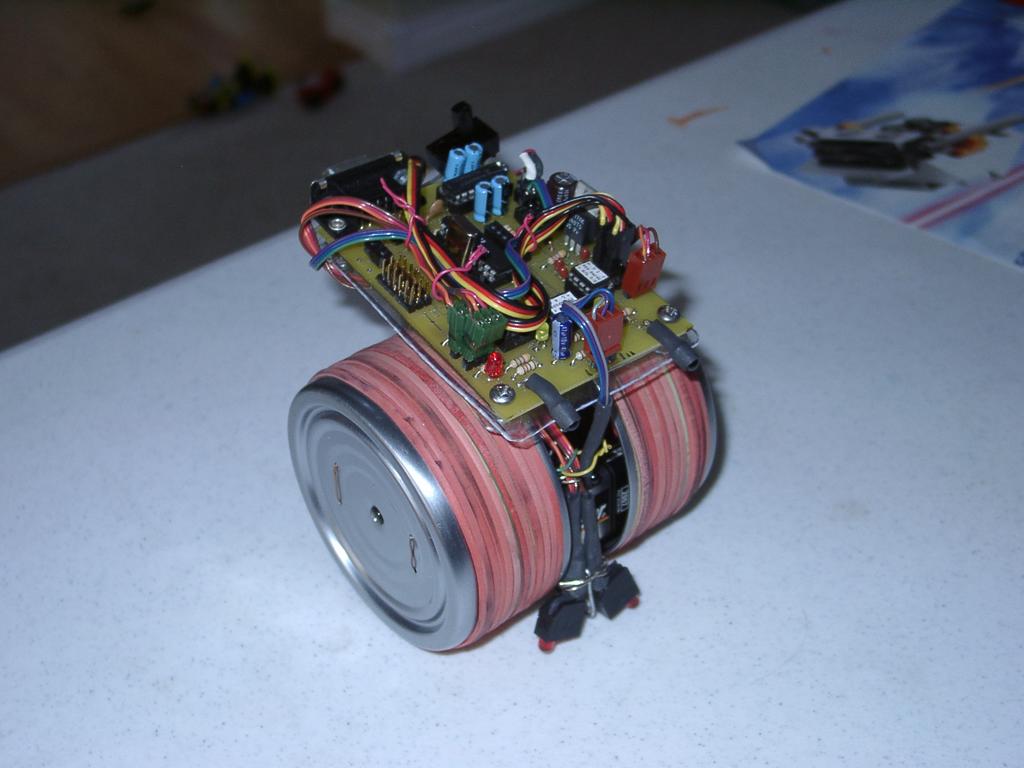
Top, back-on view, power switch at lower right
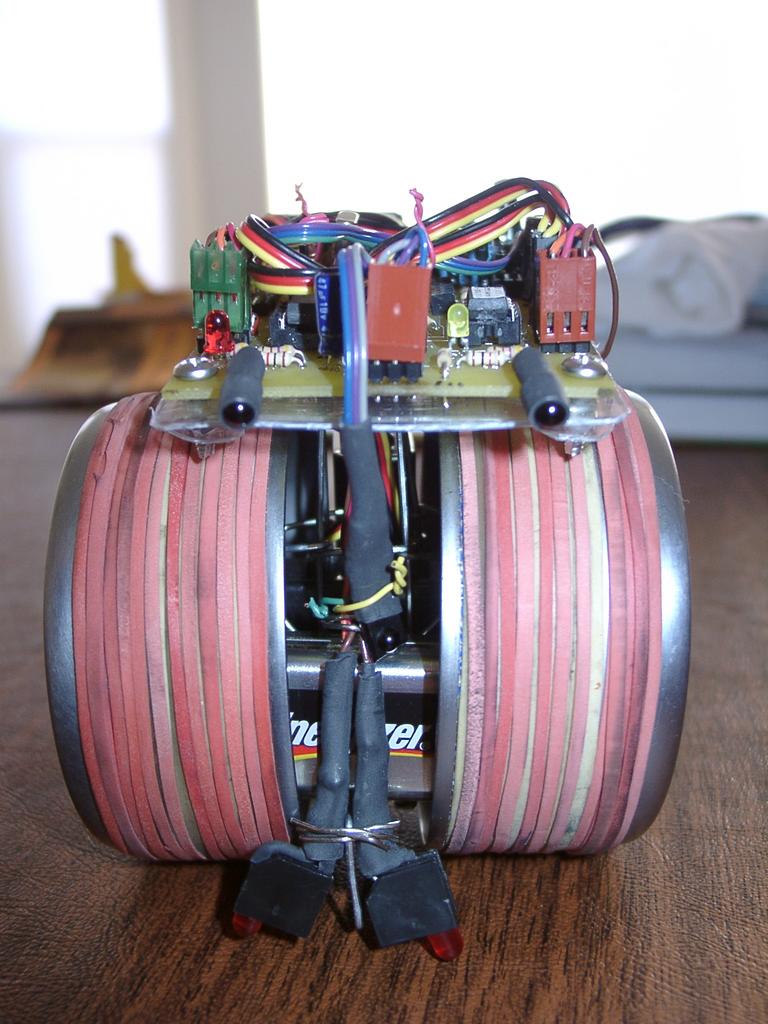
Closeup of optical line sensors - LED output and photo-transistor input
Bottom closeup
Inside a tunacan wheel - showing servo horn attached with phone wire to prevent twisting
Bottom angle-in view of robot with one wheel off
Bottom view with one wheel off
Inside lower closeup of paperclip framework, servos are held pretty tightly
Front closeup, with one wheel off, showing plastic insulation of circuit board
Side view with wheel off, showing paperclip frame, both batteries and servo drive
Side view above with one wheel removed, showing servo drive and batteries inside
Edge on circuit board = nothing currently plugged into the 6 I/O pins
Front close-up, IR Sensorheld by yellow wire
Above, bottom two connections are the analog inputs from the light sensors, the top 2 on the left of the bank of 4 are servo connectors, and the 1 on the right is the seperate power for the servos
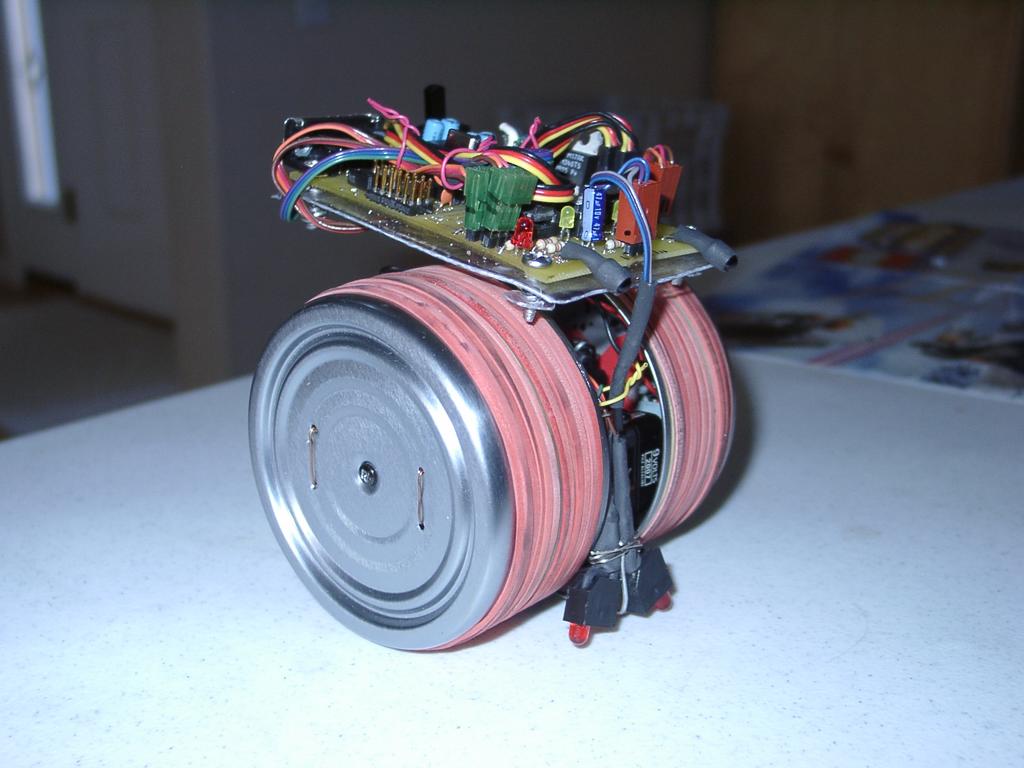
Top, angled down view
Side on veiw - you can just see the second battery I added in front, The IR LEDs are now incased in shrink wrap, and I moved the IR sensor halfway down